

Original paper: Solvent-free, supersoft and superelastic bottlebrush melts and networks
Polymers are made of long molecules (polymer chains) consisting of shorter, repeating units called monomers. Like cooked spaghetti noodles, many polymer chains coexist in the same shared space and when too many of them overlap entanglement may occur (Figure 1). Such entangled messes of polymer chains are stiff and hard to deform, limiting the elasticity of polymer-based synthetic materials. One way of softening materials is by disentangling the polymer chains via soaking the polymer chains in a solvent, such as water. The solvent molecules in hydrogels occupy space between polymer chains driving the chains away from each other, similar to how pouring water overcooked spaghetti drives the noodles apart. This led to the discovery of hydrogels, the primary component of soft contact lenses and tissue implants [1]. But if you’ve ever worn soft contact lenses, you may know that they dry out and harden if they are not stored in a solution. This pervasive issue of hydrogel materials occurs when the solvent leaks or evaporates, affecting their mechanical properties. In this week’s post, polymer scientists develop super-soft dry elastomers (very elastic or rubbery polymers) that surpass the softness and elasticity of hydrogels, all without getting their hands wet.

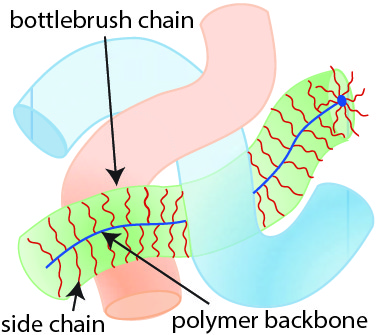
What does it take to design a polymer material that intrinsically avoids entanglement without using a large amount of solvent? William Daniel and his colleagues tackle this issue by designing a polymer chain geometry resembling a bottlebrush (shown in Figure 2). The bottlebrush geometry consists of a linear polymer backbone onto which short side chains, called bristles, are grafted. These bottlebrush-shaped chains are soft even in the absence of solvent. Instead of relying on small solvent molecules, bottlebrush networks use their bristles to keep polymer chains away from each other because bristles are too short to participate in the entanglement. As a result, the bottlebrush chains have an overall repulsion effect that resembles the repulsion effect of solvent molecules in hydrogels. Bristle repulsion allows bottlebrush polymers to surpass the elasticity of hydrogels! As an example, Figure 3 shows a compression test where a bottlebrush elastomer (on the right) retains its structure whereas a hydrogel material (on the left) fractures when compressed. Despite their similar elastic moduli, the bottlebrush elastomer displayed much greater compressibility than the hydrogel.
But what is an elastic modulus and why does it matter? The elastic modulus is a measure of the stiffness of a material and is given by the ratio of stress, the force causing deformation per area, to strain, the relative length by which the material is deformed by the stress. In these terms, a small modulus corresponds to low force per area resulting in significant deformation during compression – exactly what we expect of soft materials! As the entanglement density increases, a polymer chain network becomes more crowded resulting in a stiffer material [2]. Since bottlebrush bristles are too short to entangle, increasing the bristle density further reduces the entanglement density. Thus the elastic modulus of bottlebrush elastomers can be tuned by controlling the number of bristles grafted onto the polymer backbone. These bristles comprise the majority of the mass of the elastomer, e.g. 87% of the mass of the elastomer described in Figure 3.
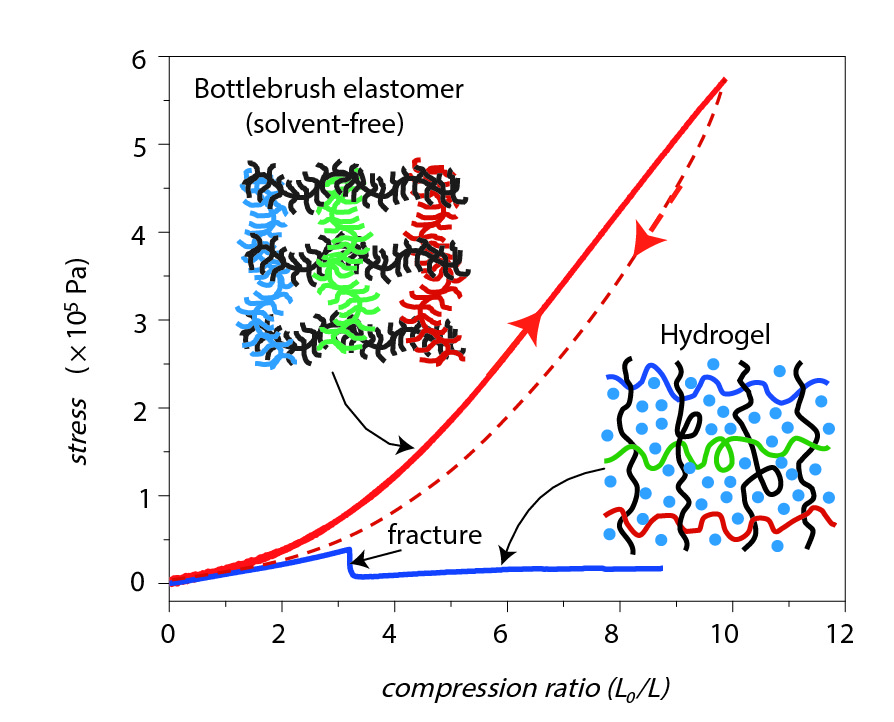
In addition to super-softness, bottlebrush networks are also highly compressible. The stress measurement in Figure 4 shows that bottlebrush elastomers (red curve) tolerated five times more stress before fracture compared to hydrogels (blue curve). Furthermore, the compression ratio (equilibrium length to compression length) of bottlebrushes was three times higher before fracturing. This means that bottlebrush elastomers are capable of sustaining much more deformation, and hence strain, than hydrogels.
The idea of attaching bristles onto a polymer backbone in high density gave William Daniel and his colleagues control over the stiffness due to entanglement. This work expands scientists’ understanding of material properties consisting of branched polymer chains and points to a new frontier of dry supersoft materials. These new materials could play an important role in the development of soft robotics and synthetic biological tissues.