

Original paper: Printing ferromagnetic domains for untethered fast-transforming soft materials
If we could shrink a submarine down to the microscopic scale, could we pilot it into the human body to fight infection and perform surgery? Despite suggestions from futuristic sci-fi such as “Fantastic Voyage”, “Honey, I Shrunk the Kids”, “The Magic School Bus”, “Power Rangers”, and “Rick and Morty”, we cannot survive such shrinking and our vessel would be without a pilot. But it may still be possible to “shrink” down some of our technology and control it remotely as we will see from researchers at MIT in this week’s paper.
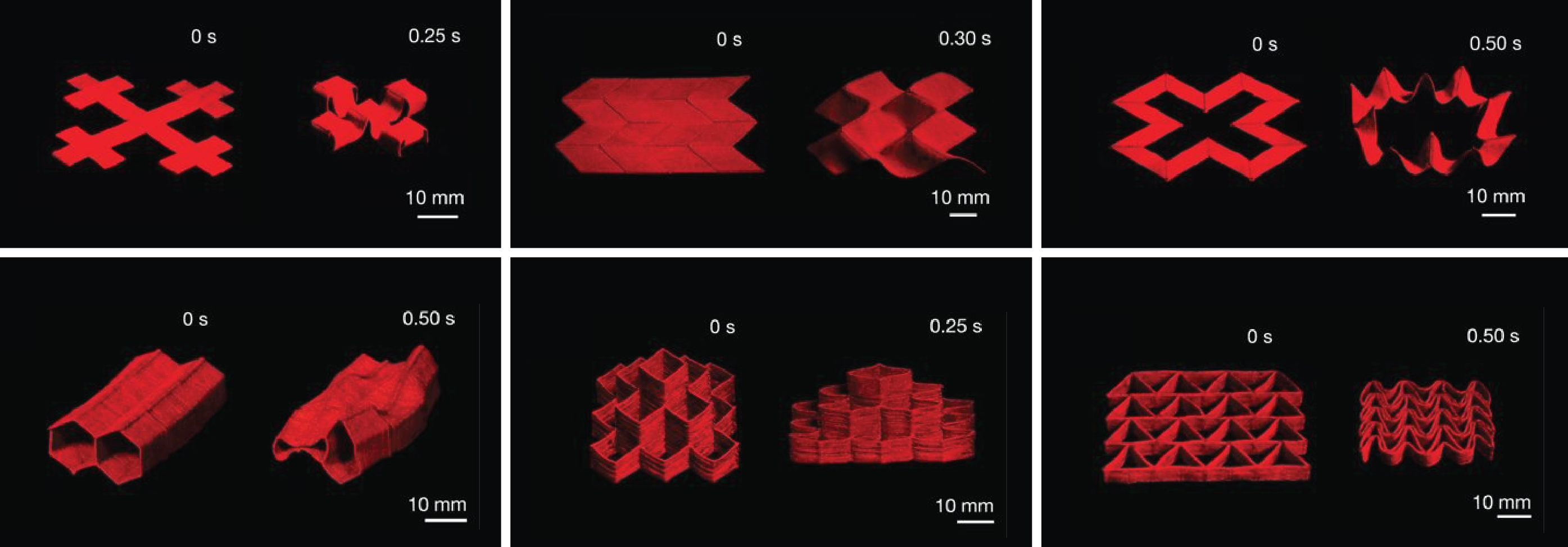
In their letter to Nature, author Yoonho Kim and colleagues at the Zhao lab reveal a dazzling zoo of tiny transformable machines. Following recent trends in the metamaterials community, they built a series of “origami” and “kirigami” samples inspired by the cutting and folding of traditional Japanese paper art.
But, unlike traditional origami, these special sheet-like materials are able to fold themselves up and change shape on command, as shown in Figure 1. With this remarkable new technique, they assemble panels and tubes into a variety of structures which can shrink, shear, expand, and change shape, as well as pipes which can obstruct themselves on command.
To create these machines, Kim combines two relatively simple ingredients: 3D printing and magnets. These tiny gadgets do not resemble conventional robots and are better described as 3D printed flexible materials with specialized ferromagnetic regions. So let’s break these ingredients down piece-by-piece.
The process of 3D printing involves a nozzle depositing an “ink”. As the ink leaves the nozzle, it sticks and transitions from a fluid state to a hard or rubbery state, becoming a solid piece of the “printout”. By choosing where to put these squirts of ink, a 3D printer is able to quickly and accurately build 3D structures.
Typically this ink is some sort of molten plastic or rubber, but by including tiny magnetic bits in the ink and applying a magnetic field as it passes through the nozzle, the magnetic bits will reorient themselves and the ink can adopt the magnetic properties of the applied field. Then, as the ink hardens, this magnetic alignment will be “frozen in”. The result is a flexible material that “remembers” the magnetic field that was present when it formed. And what’s more, by changing the direction of the applied magnetic field over the course of printing, the material can be programmed with regions of different magnetic orientations.
Now, when this printed and patterned material is exposed to a magnetic field again, all these little magnetic regions of the material will try to align themselves with the field. The result is a controlled and predictable change of shape. Careful design of these magnetic domains by Kim and colleagues is the secret behind their self-folding origami as well as complex shrinking and reshaping materials, which seem to be just the tip of the iceberg.
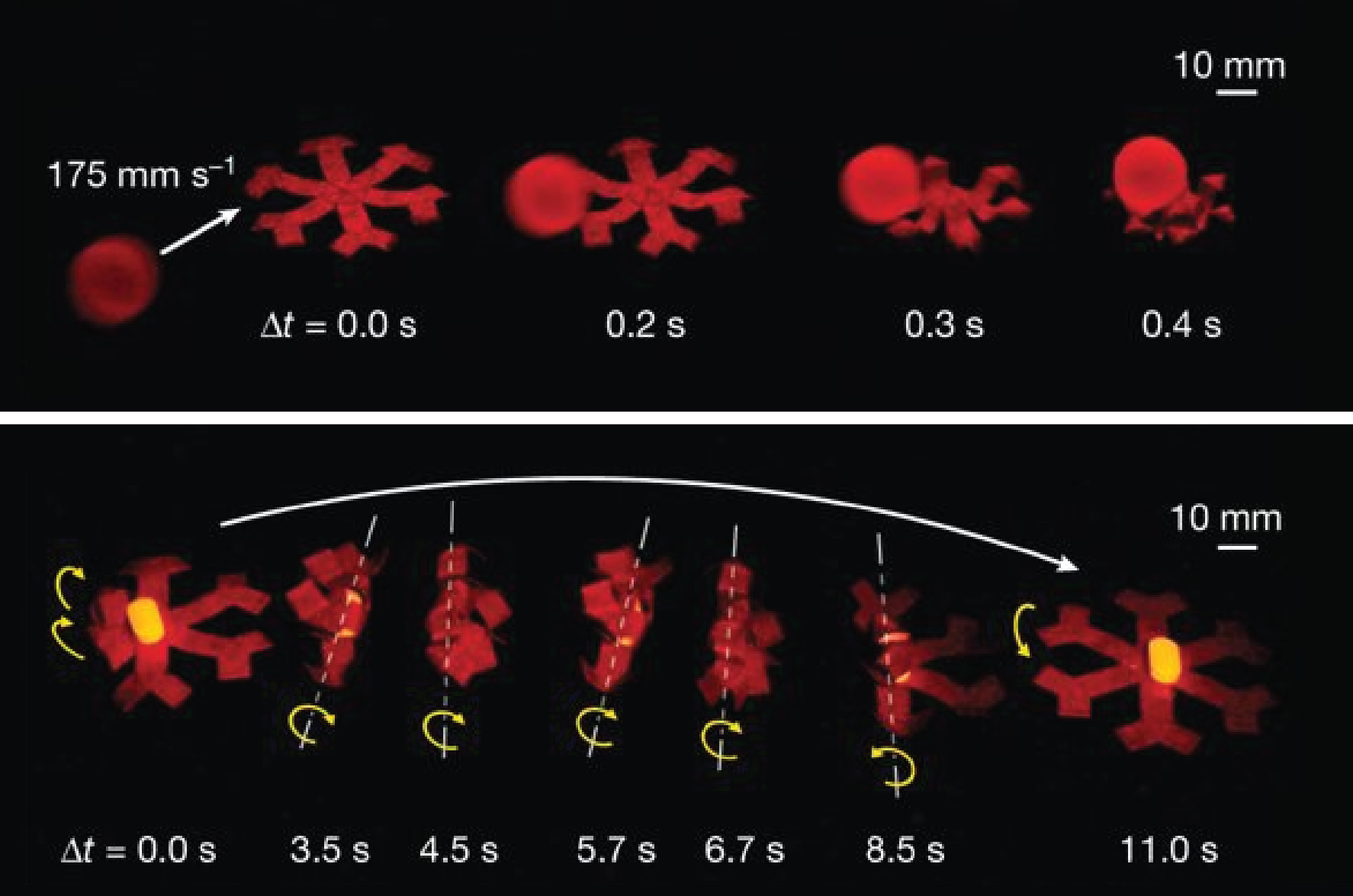
While all these machines are controlled remotely, the material design is permanent and raises questions of multifunctionality. As an inspiring counterexample, the researchers present a flat “soft robot” which can crawl, catch, and can even wrap and roll a small load across a distance as shown in Figure 2. The variety of moves available to this robot stem from clever dynamic variations of the external magnetic field. To really appreciate all of these devices, be sure to check out the videos in the Supplementary Section in the paper (definitely don’t miss Video 8).
Perhaps these dynamic contraptions could soon be deployed inside a living creature, opening the door to new surgical and diagnostic techniques. While an individual robot may be limited to some simple pre-designed action, many medical applications like cutting and sewing are simply repetitive, basic movements. While this possibility has inspired many researchers in the Soft Matter community and beyond to start building a remarkable variety of tiny robots, none of them have yet found their way into the human body to complete a medical task.
In medical applications, biocompatibility is crucial, for both the object itself and its control mechanism. Fortunately, the magnetic fields used in this research can be safely applied to a human body — the field strengths used in Zhao’s lab are lower than those in standard MRIs. However, these robots currently occupy a size scale of roughly 1 centimeter across – HUGE in biological terms. To perform non-invasive surgery, a robot would need to shrink down closer to the micron scale. So it appears that the future of this game will be akin to the development of the transistor: a search for the small and the powerful.
Hi, I found your very useful blog while writing a post for metafilter on soft-computing and using natural or fabric meta-materials.