

Original paper
Emergence of macroscopic directed motion in populations of motile colloids. By Bricard A., Caussin J-B, Desreumaux N., Dauchot O. & Bartolo D.
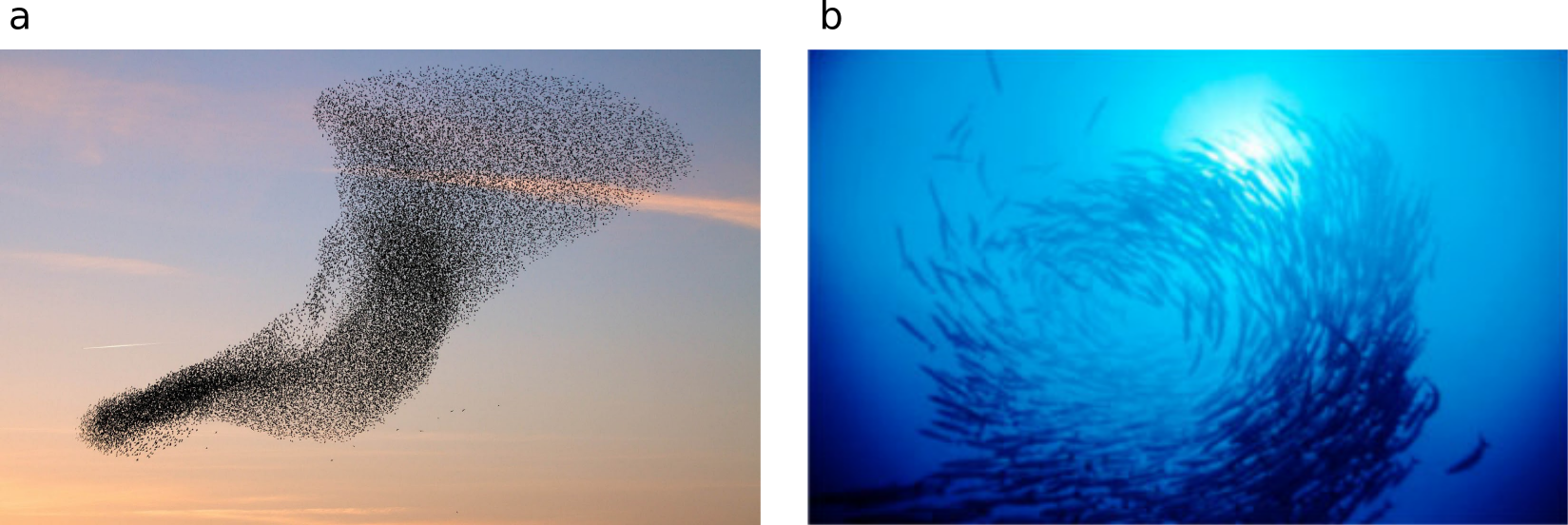
Have you ever seen those wide shapes moving in the sky at dawn, made of thousands of starlings, or the swarms of fish swimming in the ocean (see Figure 1)? The ability to organize and move in groups without a leader is called collective motion and has been observed at various spatial scales in the living world, from birds to locusts, cells, and bacteria. Even humans can perform collective motion in some situations, as it has been modeled in crowd movements (for example Mosh pits). Physicists have gazed at this phenomenon over the last couple of decades trying to answer questions such as: How can different organisms exhibit the same behavior? What common features do all these organisms have that allow them to move in such a synchronized way?
The key to the emergence of collective motion is interactions, the ability of individuals to modify their behavior to coordinate their movements with those of their neighbors. The details of these interactions are difficult to model and control in many living or man-made systems, or may even still be unknown. Yet, in today’s paper, Antoine Bricard and colleagues showed how collective motion can arise solely from known physical interactions.
One of the first scientists who tackled these questions was Tamas Vicsek in the 90’s. He showed how collective motion can emerge from simple rules using a computer simulation. Although numerous theoretical and numerical studies followed, only few experiments were done. The biggest difficulty in studying collective motion experimentally is gaining control and reproducibility over a living system. Raising thousands of birds in a lab might not be the most convenient way of study, and even simpler biological systems, like bacteria, have problems of their own. Luckily, if you don’t want to deal with a biological system, you can build an artificial one. This is what Antoine Bricard and collaborators did, at Ecole Normale Supérieure de Lyon. To study collective motion, they built an artificial system made of millions of tiny, plastic beads (5 µm diameter) that were able to move freely, interact with their neighbors, and even self-organize as a group.
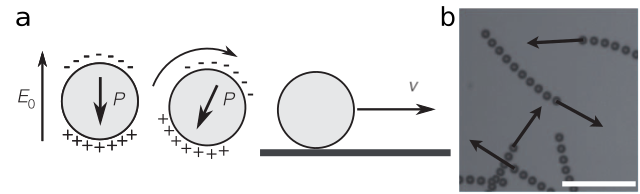
To put these inert beads in motion, researchers used a phenomenon called Quincke electro-rotation. The idea is to convert electrostatic energy into mechanical rotation. Here, the rotation is triggered by an electric field, $latex E_0$, applied to insulating beads, which are immersed in a conductive liquid. Under this field, small fluctuations in the charge distribution tilt the orientation of the bead. Then, the small rotational perturbation is amplified, resulting in a constant rotation and the bead rolling on the bottom of a pool. The researchers refer to these activated beads as “rollers”. All rollers move at the same speed, directly controlled by $latex E_0$, yet they don’t move in the same direction but rather randomly. As you can see in Figure 2, the beads move individually in different directions and there is no general directed motion. So how can this disordered system switch to an ordered motion?
Using Quincke electro-rotation, the exact interactions between the rollers were described by the research team mathematically. Firstly, the beads interact through electrostatics, like two magnets, via an interaction that depends on how far they are from each other. Secondly, the beads interact through hydrodynamics, because when a bead moves in a liquid a flow is generated around it. This generates a pull similar to a swimmer who is feeling the flow produced by another swimmer nearby. What’s more, the theory shows that the combination of these two physical interactions tends to align a group of rollers. When two beads are close enough to each other, they slightly change their course to roll in the same orientation and they all eventually move in the same direction.
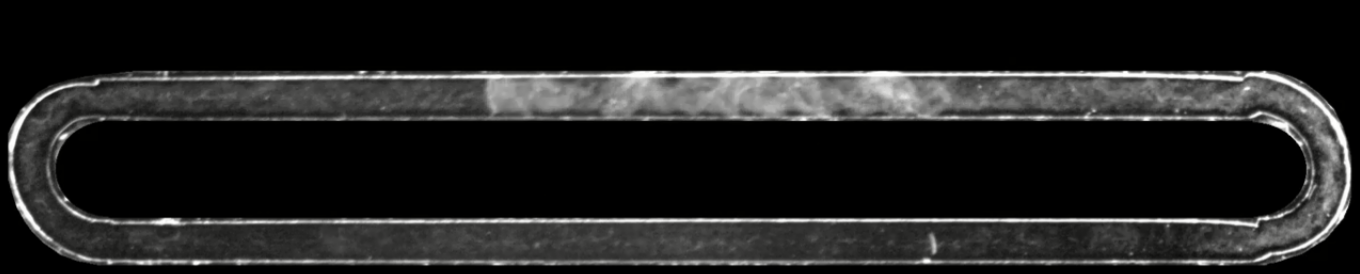
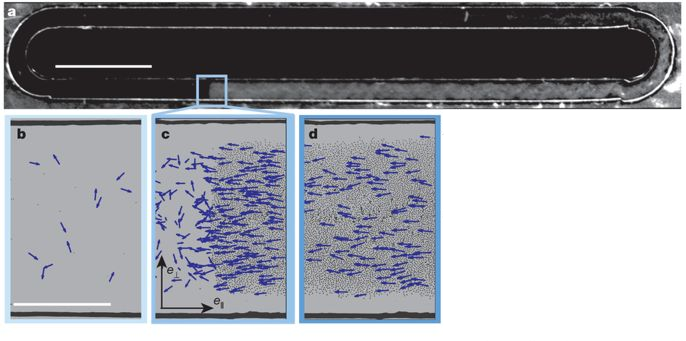
To study rollers for millions of particle lengths, the researchers chose to put them in a racetrack-shaped area (Figure 3 a). The rollers spontaneously organized, and a large band made of millions of rollers moved around the track. Of course, rollers had to be close enough in order for interactions to be effective. Figures 3 b-d show how the rollers changed behavior as they get more densely packed. In Figure 3 b, the rollers look like they are wandering in random directions because they are too far from each other to interact, while in Figure 3 d high-density rollers move in the same direction. And as more rollers are added in the same area, the interactions between rollers become more effective. This transition from a disordered state to an ordered state is called a phase transition. In most familiar cases, for example, water-to-ice, phase transitions are driven by temperature. Here density is the control parameter, meaning the research team measured what is the minimum density required for a collective motion to emerge. And being able to couple this observation with a theoretical description of the interactions, the key ingredient underpinning of the system, is what got them further than anyone else at the time.
Collective motion seems natural in many living organisms but is still poorly understood by scientists. This paper highlights the importance of interactions between individuals in a group during the process of collective motion. Even though this study is specific and does not account for the mechanisms at work in most biological systems, it was a great achievement toward understanding this phenomenon. Comparing these results with the studies of biologists, ethologists, and mathematicians make me wonder: if a scientist working in his/her lab is like a random walker, then, what beautiful picture will emerge from the work of thousands of scientists interacting with each other to understand collective motion?
One Reply to “From errant to coherent motion”