Original paper: Gravisensors in plant cells behave like an active granular liquid
Content review: Adam Fortais
Style review: Heather S.C. Hamilton
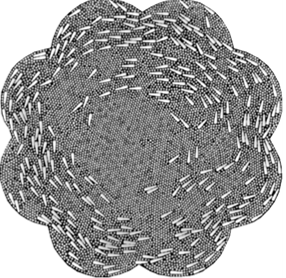
Plants need to know the direction of gravitational pull in order to grow their roots downward and their stems upward. This information is crucial whether the plant grows in your garden, on a cliffside, or even on the International Space Station [1]. While it’s been said that it took a falling apple for Newton to figure out how gravity works, our photosynthetic friends use a more intricate microscale sensor to detect gravity. This sensor consists of starchy granules called statoliths which can be found on the bottom of specialized cells called statocytes. An accumulated pile of around 20 statoliths at the bottom of a statocyte cell is shown in Figure 1. If the cells are tilted like in Figure 2, the pull of gravity initiates a statolith avalanche that indicates the direction of gravity. The position of statoliths is part of a complicated signaling network that tells the plants how to correct its growth towards or against the direction of gravitational pull.
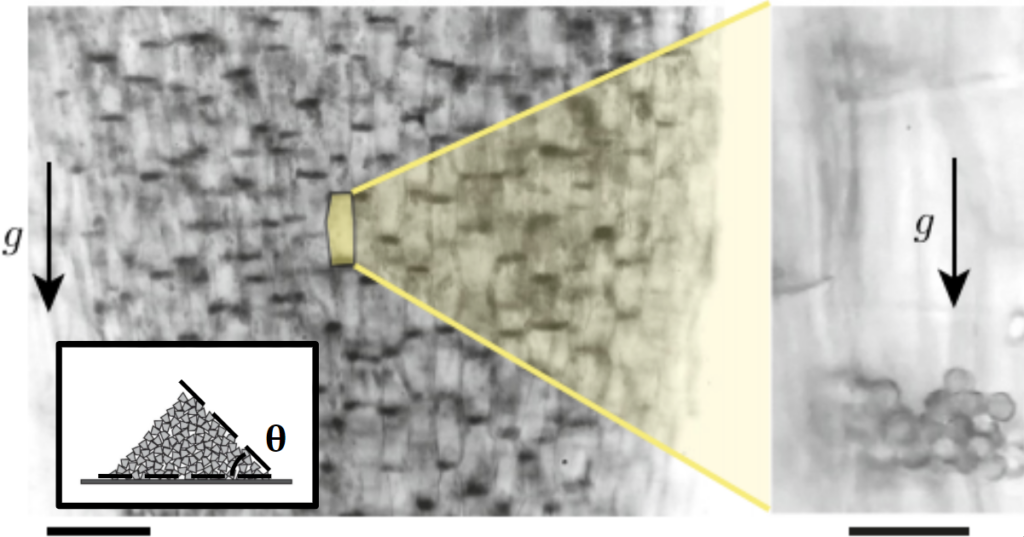
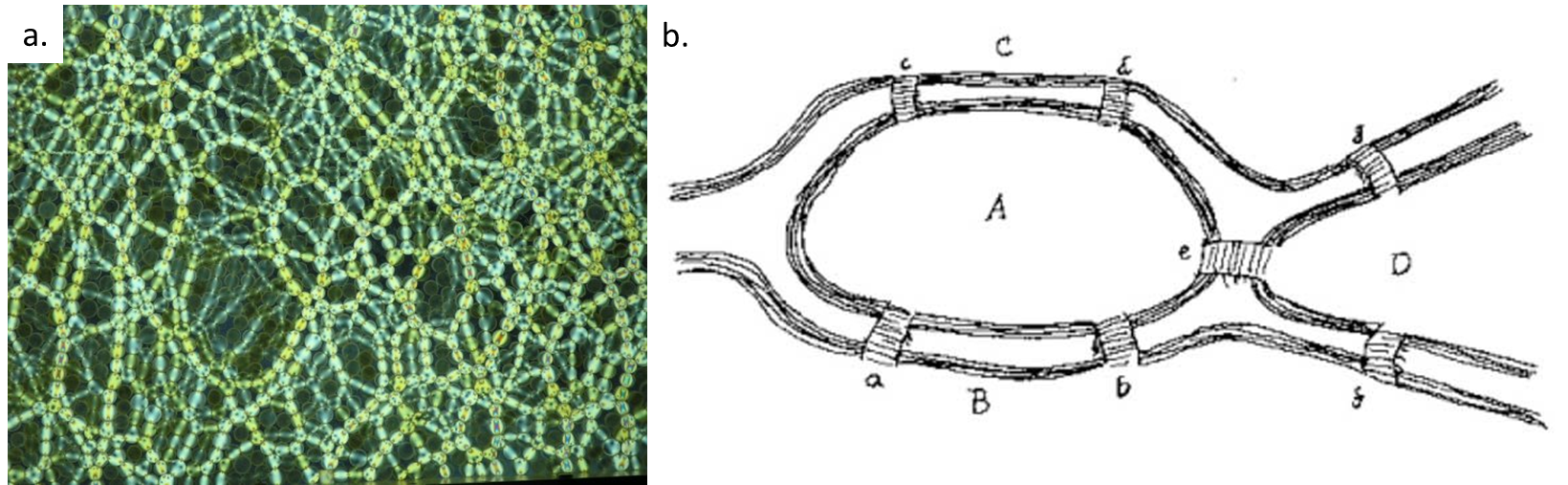
However, Bérut et. al. realized that this description of statolith piles didn’t totally agree with our knowledge of granular materials. There are two major issues. First, granular piles are known to initiate avalanches only when the slope of the pile reaches a critical angle, usually between 5° and 30° depending on the characteristics of the grains. In the case of the statoliths, the critical angle was found to be around 10°. When the slope is lower than the critical angle, the pile should be completely immobile due to frictional forces between the grains. However, plants are able to detect even the slightest changes in gravity — involving angles much smaller than 10° — indicating that avalanches are not the whole story. Secondly, upon tilting as in Figure 2, the grains seem to avalanche until they establish a flat surface layer. This is in direct contrast to classical granular materials. If statoliths behaved classically, we would expect them to avalanche until the critical angle of 10° is reached, rather than their actual final angle of around 0°. How can we explain the shocking sensitivity of these granular piles?
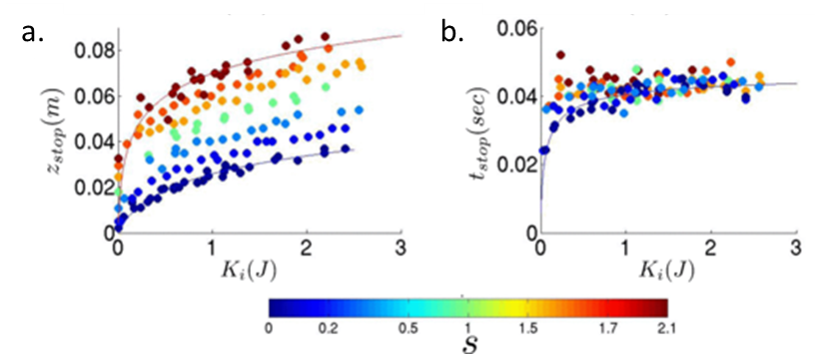
By studying the flow response of the statoliths to gentle inclinations, Bérut et. al. found that the statoliths in fact flow, liquid-like, from a pile into a puddle with or without prior avalanches! Figure 3A shows a statolith pile angle slowly creeping from 10° (or less) to 0° in 10-20 minutes. This creeping response occurs at any slope. Under the microscope, the statoliths are seen to vibrate, with each individual statolith undergoing random motion shown in Figure 3B. The statoliths are agitated, the origin of which is likely biological processes within the cell rather than random thermal motion, as thermal energy is too small to drive the observed grain activity. While we know that classical granular piles do not flow below the critical avalanche angle, this is not the case for active granular materials. Agitation allows the grains to free themselves from the pile, turning an otherwise static mountain into a fluid-like substance. Long before we had an understanding of the physical world, nature was already building and refining amazing biological machines. We have only recently begun to understand the properties of agitated granular materials, meanwhile plants have been using active grains to detect gravity all this time. Given plants’ long-time expertise with gravity, perhaps the apple that fell on Newton’s head was nature’s way of telling humans to hurry up and figure it out.