Original paper: Frogs use a viscoelastic tongue and non-Newtonian saliva to catch prey
Content review: Olga Shishkov
Style review: Heather S. C. Hamilton
What do a frog’s tongue and a piece of Scotch tape have in common? Not much at first glance. However, if you press your finger on either one of them, you will certainly feel a sensation of stickiness. Taking a closer look at the schematic in Figure 1, you will realize that these materials have a similar structure, simply a layer of glue on a substrate. For the sticky tape, the substrate is a plastic strip and the glue is made of polymers and additives which increase the stickiness of the glue. For the frog tongue, the substrate is the tongue and the glue is the saliva.

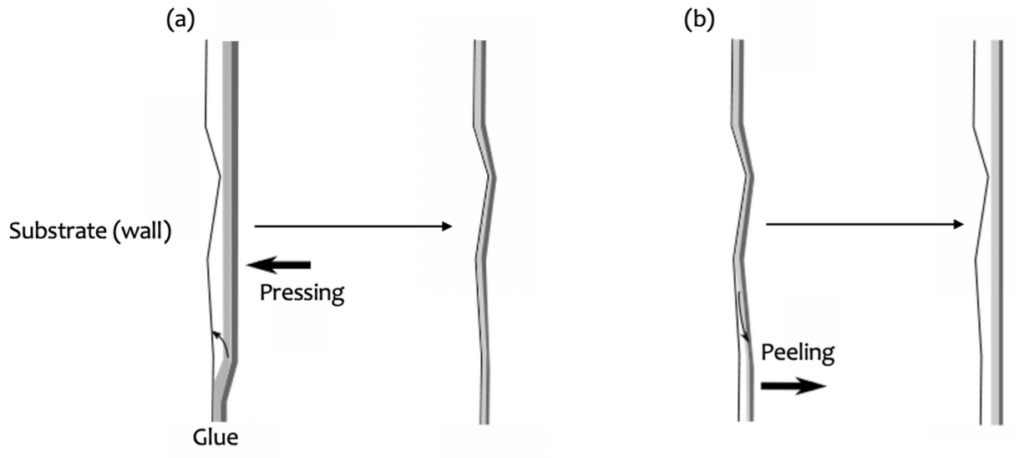
These two adhesives work quite in the same way. Let’s have a look at your classic sticky tape: when you press some scotch tape on a wall to hang your favorite poster, the glue will flow and wet all the crevasses of the wall and the poster. This process is not instantaneous though. Indeed, in order to have an efficient wetting of the surface, you have to press on your Scotch tape for several seconds, and maybe press several times. Eventually, this will generate many anchoring points between the glue and the texture of the surface. When you stop applying pressure to the tape, the glue does not flow any more, it becomes stiffer and remains adhered to your wall. However, when you peel the scotch tape, or when the object you taped is too heavy, stress is reapplied to the tape adhesive as illustrated in Figure 2. These forces will make the glue flow, the anchor points will fail, and the adhesive will be removed from the wall. No chemical bonding is involved in these adhesives: only applied stress, or the lack thereof, makes the glue flowable or not, which is why these adhesives are called pressure-sensitive. The longer you press on your sticky tape, the better the final adhesion will be as you will increase the time for the glue to flow into every detail of the surface you would like to stick your tape to.
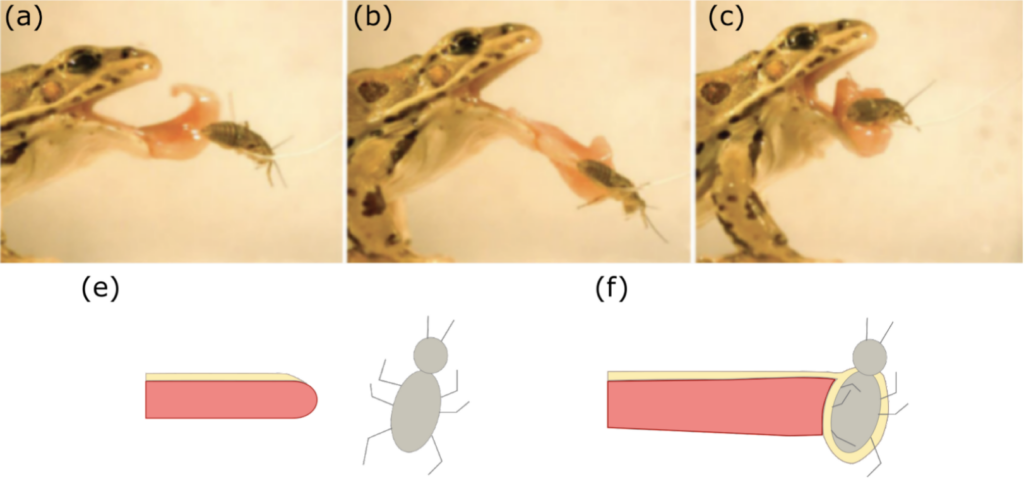
But a frog catches insects or bigger animals such as snails or slugs on its tongue in less time than the blink of an eye (under 0.07 seconds), way faster than applying your Scotch tape to a wall. A team of researchers from Georgia Tech tried to understand how a frog’s tongue can achieve this feature, because understanding the biomechanics involved can inspire synthetic high-performance adhesives with fast application times. Alexis Noel and colleagues first measured just how powerful a frog’s tongue strike is by taking a high-speed video of a leopard frog, Rana pipiens, capturing an insect. They discovered that the captured insect can feel a force equal to up to 12 times its own weight when the tongue impacts it. To find out how the frog uses these high forces to stick the insect to its tongue, Noel and colleagues characterized the saliva and the tongue separately.
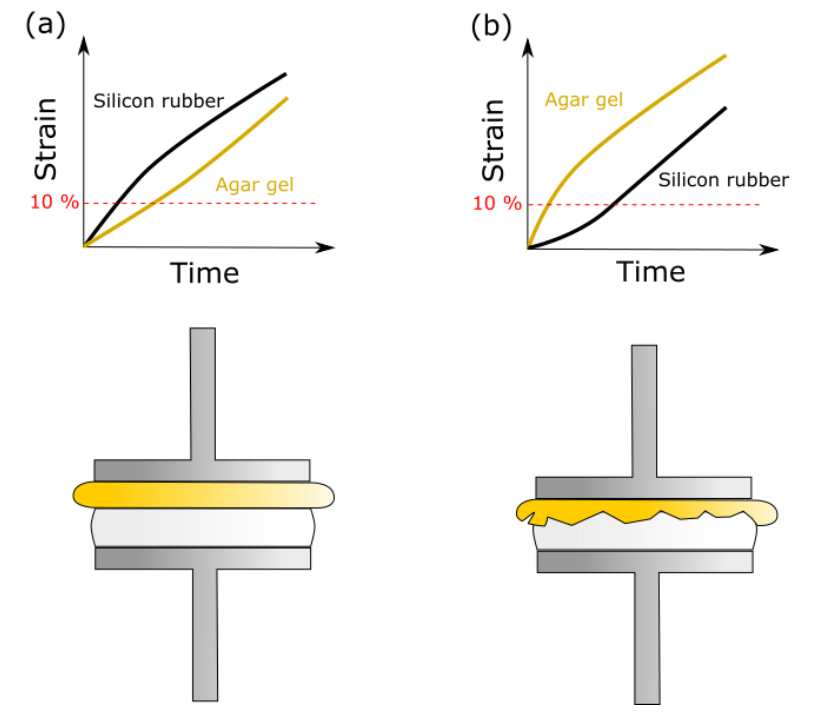
By testing the mechanical response of the saliva under deformation in an instrument called a rheometer, researchers showed that the saliva was shear-thinning. This means that when a small rate of deformation is applied, the saliva is very viscous, 50,000 times more viscous than human saliva. However, at high rates of deformation, the viscosity of the saliva decreases significantly causing it to flow like a fluid. When the frog strikes an insect with its tongue, the shock from the impact deforms the saliva making it less viscous so it flows easily and coats the insect as shown in Figure 3. After the initial deformation caused by the impact, the viscosity of the saliva increases and the insect is trapped in a very thick fluid.
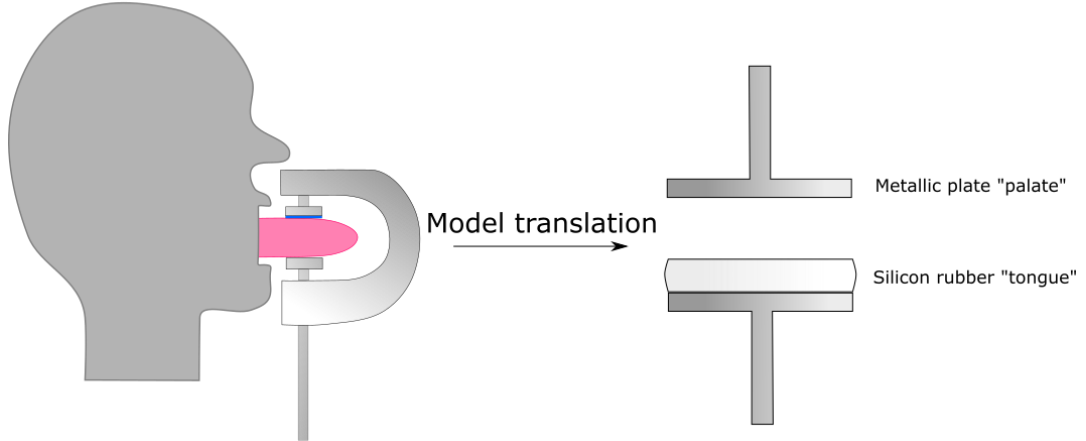
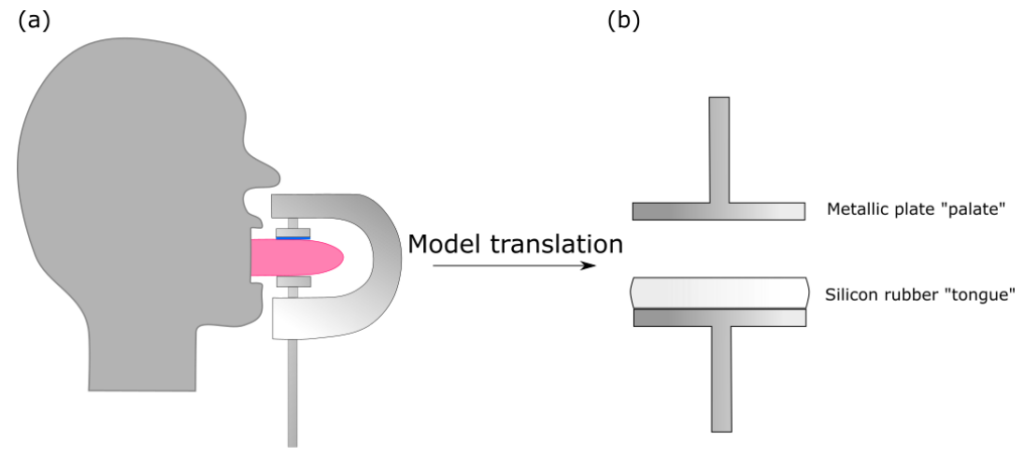
By poking the tongues of six different frogs and two different toads with a metal cylinder, a test called indentation, the researchers measured the ratio between the applied force on the tongue and its resulting deformation. This ratio, called Young’s modulus, describes the softness of the tongue. On average, the frog tongues have Young’s modulus ten times lower than that of a human tongue, making them ten times softer than a human tongue. Frog tongues are able to deform around the insect to increase the prey-tongue contact surface area. Soft frog tongues also absorb the massive shock from impacting an insect much like a car’s shock absorber. The internal damping of the soft tissue allows the tongue to wrap around the insect during the capture and keep it in contact with the prey for good adhesion with the saliva. Now that the insect is trapped, how does the frog bring back its prey to its mouth? It is crucial to keep the insect coated in the sticky saliva as the tongue is retracted back into the mouth of the frog because this happens as fast as the initial stretching for insect capture. Remember the sticky tape example? Applying too much stress on the glue by peeling off the tape makes the glue flow, resulting in a loss of adhesion. The soft tongue dampens the stress of retraction on the saliva to prevent it from flowing. Once the insect is in the frog’s mouth, the only way to release the prey from its tongue and eat the insect is to retract its eyeballs, thereby squeezing the tongue hard enough so the saliva can flow again and free the prey.
Overall, this mechanism using a soft tongue and shear-thinning saliva shows great adhesive performances at speeds unmatched with synthetic materials. This article shows once again that nature can produce amazing materials and concepts which could be used for bio-inspired designs of synthetic analogs. Thanks to the deeper understanding of the frog prey-catching phenomenon, one can of course think about more efficient pressure-sensitive adhesives or glue guns, but also about robots trained to catch dangerous insects as fast as a real frog.