

Original paper: Bio-inspired pneumatic shape-morphing elastomers
Conventional robots typically move by moving rigid pieces relative to one another — think of a robotic hand where rigid bars rotate at joints. In other words, conventional robots have a small number of “degrees of freedom” — the angle of bending of the joint of a robot hand would be one degree of freedom, for example. Soft robots, on the other hand, have many degrees of freedom: they can bend and deform into lots of different configurations. Because of this, they often display continuum-like behaviour, similar to what is seen in the movement of natural organisms such as worms and octopuses. These robots offer great promise in many fields, from soft instruments for minimally invasive surgery to shape changing airfoils for increased flight control. One of the particularly difficult challenges in soft robotics is to design systems that are flat at rest but can rapidly transform to an arbitrary three dimensional shape when activated. Recently, Emmanuel Siéfert and co-workers developed baromorphs— thin, flexible sheets which can be air inflated (“pneumatically activated”) into a pre-programmed target shape.
The researchers were inspired by what they saw in nature, where there are many examples of thin, sheet-like objects, such as flower petals, which grow into intricate curved shapes. They do this by growing faster in some areas than others – this results in the petal curving in three dimensions. When biological growth is not an option, as in man made materials, the problem is difficult since thin, flexible sheets can only change shape by bending; they cannot stretch, as this is energetically unfavourable [1]. This places a strong restriction on the shapes that they can be morphed into. Researchers have previously approached this problem by swelling highly absorbent gels in a hot bath water; specifically, by controlling where the swelling occurs, they mimicked non-uniform growth seen in nature. Whilst promising, the time taken for the shape to change was limited by how quickly water can move from high to low concentrations—this is typically very slow—and, furthermore, the resulting structures were typically too soft to sustain their own weight. Pneumatically activated structures, on the other hand, depend only on the air flowing through them, and so can be made into a much wider variety of shapes.
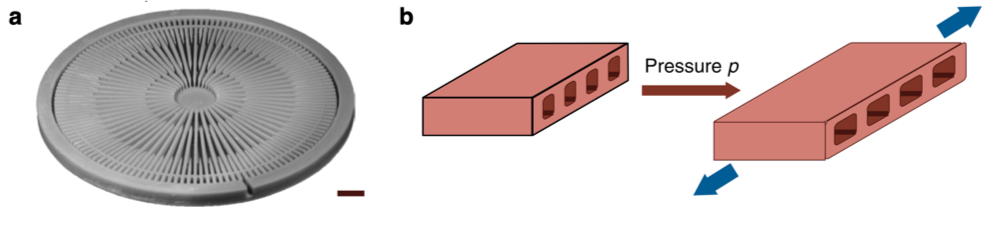
The researchers produced pneumatically activated baromorphs by setting two identical thin, rubber pieces in 3D printed moulds containing cavities for air to flow (Figure 1a) and then sticking the two pieces together. The process leaves an embedded network of channels through which air can flow (Figure 1b). Inflating the channels applies pressure to the channel walls, inducing a stretch along the width of the channels but not along their length (blue arrows in Figure 1b). Depending on the arrangement of the tubes, inflation can create excess length in the structure which is incompatible with a flat shape, forcing the structure to buckle out of plane. This creation of excess length is analogous to the inhomogeneous growth that leads flower petals to curve.
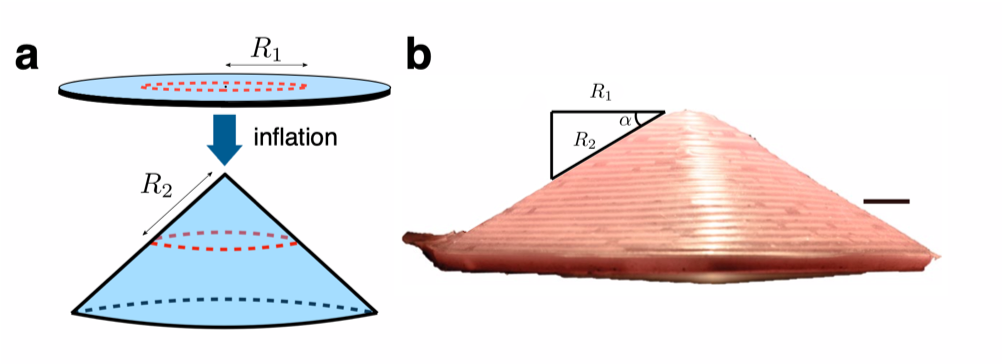
The effect is demonstrated by Siéfert et al. with an initially flat, circular baromorph containing circular channels. For this geometry, the excess length, created by inflation, stretches a channel of radius of radius $latex R_1$ to a radius $latex R_2>R_1$ (Figure 2a). This causes the baromorph to buckle out of plane and form a cone, whose apex, $latex \alpha$, satisfies $latex cos(\alpha)=R_1/R_2$ (Figure 2b). Moreover, by solving the equations of linear elasticity, the angle can be predicted as a function of the applied pressure.
Whilst inflating into a shape is not new, it has so far been limited to movements which deform every part of the shape in the same way, e.g. bending, twisting, and expansion. And, since baromorphs are activated pneumatically, the time taken to transform from the two dimensional (flat) configuration to the three dimensional one is limited only by the air flow through the channels. In other words, they can change state very quickly; the researchers demonstrated this by oscillating a conical baromorph at a frequency of 2 Hz (see video). Further, the structures aren’t size limited; they can easily be made to support their own weight by simply increasing the inflation pressure.
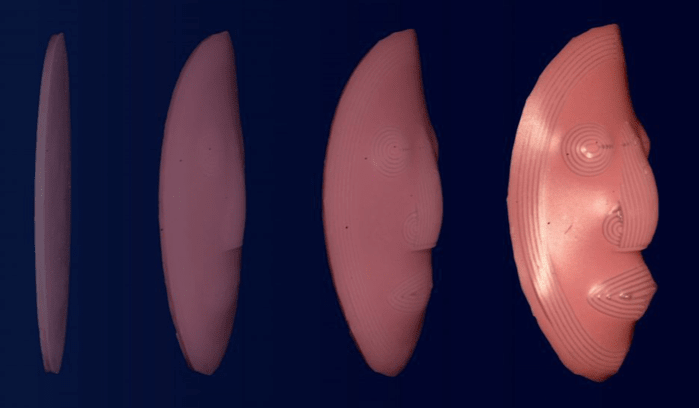
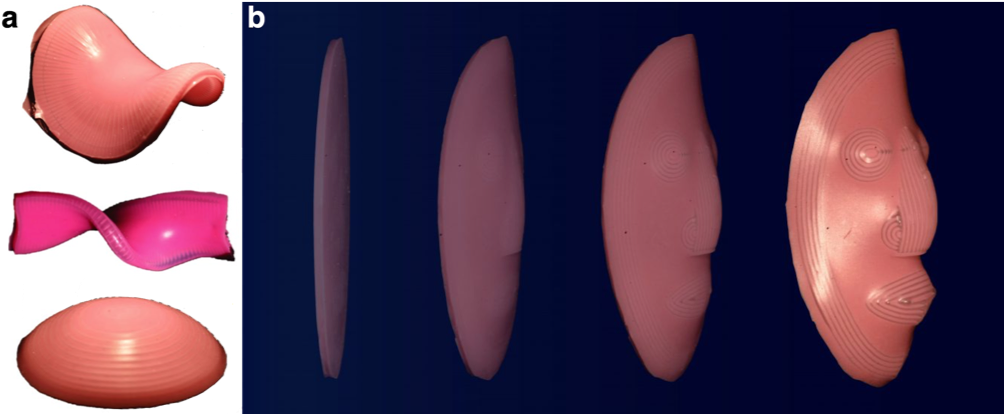
The key advantage of baromorphs over other pneumatically activated shape-morphers is their ability to take a wide variety of shapes obtained by simply tailoring the orientation and size of air channels in the network. For instance, baromorphs can be made into spherical caps, saddles, and helicoids (Figure 3a). This leads to the question: given a three dimensional target shape, how should the channel network be chosen? The team have derived a simulation which predicts which embedded channel structure should be chosen for a given target shape. The accuracy of this simulation is demonstrated by producing a baromorph that inflates into a face (Figure 3b).
Overall, baromorphs are an exciting prospect for future applications: they’re easy to produce; they can take virtually any pre-programmed shape [2]; and they can be inflated very quickly. The authors hope their work will allow other researchers to use shape-shifting materials in flow-optimization — tailoring the shape of air channels to maximise flow — as well as minimally invasive surgery.
[1] The energy penalty associated with stretching an elastic membrane scales with its thickness, whilst the penalty associated with bending scales with its thickness cubed. As a result, sufficiently thin sheets experience a much larger penalty when stretching compared to bending.^
[2] Infinitely thin baromorphs can, in theory, take any shape. In practice, their finite thickness means they struggle to reproduce regions where the shape changes sharply, such as around the lips in Figure 3b.^