Original paper: Bioinspired MXene-Based User Interactive Electronic Skin for Digital and Visual Dual Channel Sensing
Content review: Heather Hamilton
Style review: Arthur Michaut
Human skin has many functions beyond ensuring that all of our insides stay, well, inside. Skin also acts as a giant sensor that feels sensations like pressure, temperature, or vibration, and converts them into electrical signals to be processed by the brain. In the animal kingdom, some species like chameleons can even use their skin to selectively blend into their environments. Scientists have set out to create electronic skins, or e-skins, that can mimic or even outperform the typical functions of the human skin by taking on color-changing abilities like chameleon skin. Polymer materials are excellent for mimicking skin due to their soft and elastic nature that allows them to bend and stretch without tearing. However, most polymers are not conductive, a necessary property for transporting electrical signals. To create e-skin, conductive materials are often integrated into polymer materials to add electronic properties to a flexible skin-like matrix. By also integrating a color-changing pigment, researchers from Tongji University created a unique e-skin that could digitally via measurement of current flow and visibly detect mechanical movements and change color for effective camouflaging.
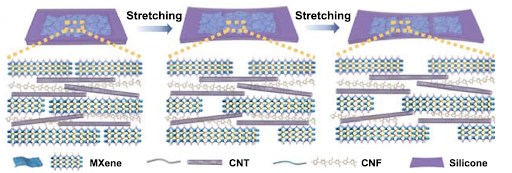
Conductive, metal-based nanosheets, called MXenes, were used because of their hydrophilic quality, which means they like water similar to our skin cells. When encapsulated in the polymer matrix, the nanosheets are connected and can conduct electrical current. However, when the e-skin stretches, the nanosheets become disconnected and stop conducting the current. To remedy this, smaller conductive materials called carbon nanotubes were mixed with cellulose nanofibers and added to the e-skin. The cellulose nanofibers (CNF) help disperse the carbon nanotubes (CNT) similar to how coating fruit with flour before adding to cake batter helps the fruit disperse in the cake during baking rather than sinking to the bottom. The carbon nanotubes act as a bridge between nanosheets in stretched states as seen in Figure 1.
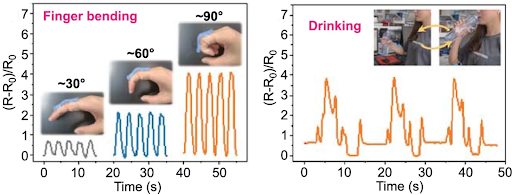
The researchers measured the resistance to electrical current flow, or resistivity, to determine the e-skin electrical response to stretching. The difference in electrical current between an unstretched and stretched e-skin can be used to detect large movements, like a finger bending at different angles, and subtle movements, like throat movements while swallowing. As shown in Figure 2, the e-skin exhibits different relative resistance to the flow of the current at different finger bending angles.
From their experiments, the researchers realized that the e-skin may have Joule heating capabilities meaning the e-skin would heat it up when current is flowing through it and quickly cool down as soon as the current is turned off. Inspired by color-changing abilities found in some animal skins, the researchers also mixed thermochromic pigment into the polymer matrix before casting the e-skin. These pigments change color as they are heated above 31°C. (Figure 3a).

As soon as the current is turned off, the e-skin begins to cool, returning back to its initial color. Since the current flow can be altered by stretching the e-skin, the temperature and subsequent color can also be changed by stretching the skin. When current is flowing through the unstretched skin, the e-skin temperature increases, causing it to turn white. When stretched, an increase in electrical resistance causes the e-skin to return to its initial color. Instead of waiting for an electrical current reading, strain and temperature are visibly detected by the color of the e-skin. This strain color-changing ability was used to detect finger movements when the e-skin was applied on a hand (Figure 3b). To demonstrate the camouflage phenomenon similar to a chameleon changing its colors to mimic the environment, an e-skin was attached to a green plant (Video).
The e-skin changes color from a dark green to a light green similar to the plant in about 90 seconds simply by turning on a current. This e-skin camouflaging ability goes well beyond the natural abilities of human skin and would be useful for military applications for quick camouflaging. The creation of this multifunctional e-skin is an exciting innovation for the wearable technology field and brings us one step closer to becoming chameleons.