As their name suggests, so-called “granular materials” are made up of “grains” — small (but macroscopic) pieces of sand, glass beads, coffee grounds, or almost any other solid you can think of. Granular materials can flow like a liquid (like sand in an hourglass), resist deformation like a solid (like the sand under your feet at the beach), or quickly transition between these states (like pebbles in a rockslide).
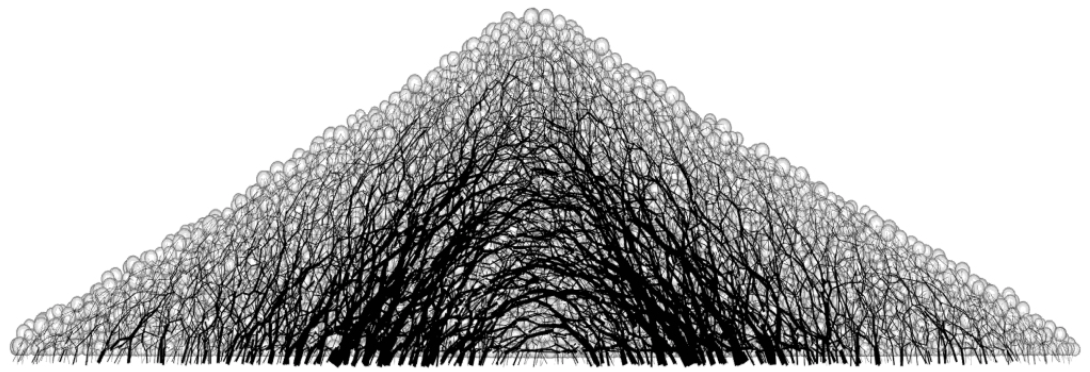
Granular materials have properties that have no equivalent in regular materials like wood, metal, or rubber. In solids like these — the kind we learn about in materials science class — a force applied to the surface propagates through the material smoothly and predictably. If a uniform force is applied to the surface of a material, every equally sized cross-section of that material bears the same amount of load. In granular materials, however, the situation is very different: in a sand pile under stress (that is, when a force is applied to its surface), the force is distributed unevenly — some individual sand grains bear far more load than others. Surprisingly, this remains true even when the sand grains themselves are identical. What’s more, the load-bearing grains connect to one another to make a fractal, lightning-like pattern inside the material, like that shown in Figure 1. These string-like arrangements of load-bearing grains are called force chains.
Figure 1 – Force chains in a computer simulation of a sand pile. The thickness of a black line indicates the magnitude of the force at that point inside the sand pile. (From Nadukuru & Michalowski (2012).)
As Figure 1 shows, force chains are easy to identify in a computer simulation. But can you “see” forces inside a real material? Today’s paper — which is from 2005 but has already proven to be a classic in the field — shows us how it can be done. The secret lies in a clever choice of “grain”: in their experiments, Majmudar andBehringer use about 2,500 transparent plastic disks, each about a centimeter in diameter and half a centimeter tall. These disks are placed in a thin container that confines them to a single plane — this experiment is similar to the board game Connect Four, but without the vertical rails.
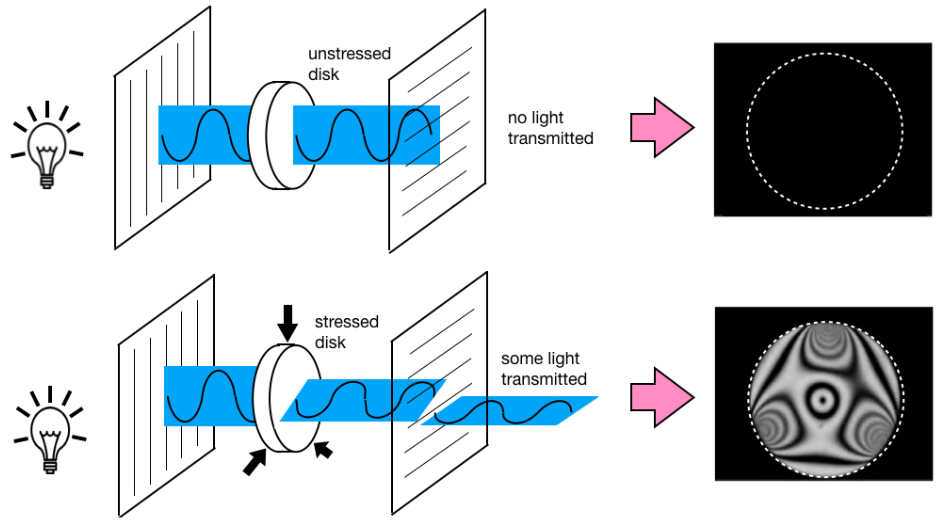
Crucially, these plastic disks have a property called photoelasticity: when they are stretched or squeezed, they deform, and when they deform they alter the polarization state of light passing through them. For instance, linearly polarized light might be converted into circularly polarized light, or light that’s still linearly polarized, but along a different axis than before. Thus, placed between crossed (perpendicularly oriented) polarizers, an unstressed disk will appear dark, but a squeezed or stretched disk will appear bright, since any alteration of the polarization state of the incoming light will allow some of it to pass through the second polarizer. What’s more, the pattern of light — like that shown in Figure 2 — can be used to infer the normal and tangential forces acting on each disk.
Figure 2 – Two plastic disks placed between crossed polarizers [1]. For an unstressed disk (top), the polarization state of the light is unaltered, and no light gets through the second polarizer. For a disk under load (bottom), the polarization state of transmitted light is altered — in this case, the polarization axis is rotated — allowing some light to pass through the second polarizer. The forces on the disk, indicated by thick black arrows, can be inferred from images such as the one on the bottom rightBy imaging lots of disks at the same time, photoelasticity can be used to infer the overall stress pattern inside a granular material. Majmudar andBehringer are especially interested in two particularly simple situations: isotropic compression and shear. Under isotropic compression, the collection of disks is squeezed equally from all sides, while under shear, the collection of disks is squeezed on top and bottom, but allowed to expand by an exactly equal amount at the sides.
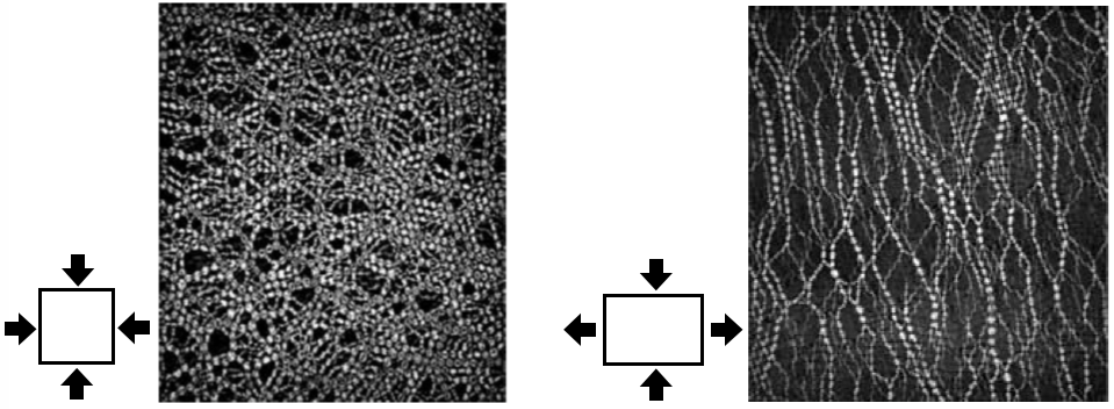
Interestingly, the system responds very differently to these two types of load: for isotropic compression, the force pattern, shown in the left panel of Figure 3, resembles a random network — short chains of highly stressed disks connect over distances of a few diameters. For shear (Figure 3, right panel), the situation is very different: long force chains, tens of disk diameters in length, extend in the direction along which the system is being squeezed. This phenomenon, where an applied stress causes the material itself to change in a direction-dependent manner, is called stress-induced anisotropy; it is not captured by the linear elasticity theory that students typically learn, even in advanced material science classes.
In the decades since this paper was published, the techniques pioneered by Majmudar andBehringer have allowed scientists to better understand properties of granular materials: under what circumstances force chains form, how they depend on properties of the disk such as shape and friction coefficient, and how they influence behaviors such as jamming – the rapid transition from a flowing state to a rigid one.
Figure 3 – A granular material under isotropic compression (left), and shear (right). In the sheared system, long, oriented force chains are clearly visible.
Postscript: On the day of publication, we learned of the recent death of the PI of this paper, Bob Behringer, at the age of 69. This post highlights just one of the many contributions of this widely respected scientist to the field of soft matter physics. For a more detailed overview of Behringer’s life and work, see here.
Notes:
[1] The experiment described in the paper used crossed (oppositely oriented) circular polarizers rather than the linear ones shown here, but the principle is the same.
Most of us have had the childhood experience of blowing bubbles. But have you ever wondered how bubbles form and what keeps them stable? The key to making bubbles is surface tension, the tension on the surface of a liquid that comes from the attractive forces between the liquid molecules. Water has a very high surface tension (that’s why bugs can walk on water) making it difficult to stretch to form a thin water layer that we see when bubbles form.By adding soap to water, we can lower the surface tension of the water, allowing us to stretch this water-air interface to form a thin water sheet. As you blow more and more air into a bubble, the bubble will grow larger and larger as the thin layer stretches. Eventually, you’ll reach the limit of the added stretchiness, and the bubble will burst, engraving in your memory its fragile nature.
A typical air bubble made out of a water-soap mixture (Figure courtesy of Gilad).
In soft matter, sometimes scientists utilize materials such as solid macroscopic particles instead of soap molecules to reduce the surface tension of an interface. Using particles to stabilize an interface allows them to tailor the mechanical and chemical properties of the interfaces to fabricate capsules. For instance, if a capsule needs to travel in blood-stream for therapeutic purposes, it must be tough enough to withstand blood pressure without rupturing. But if we make such a capsule how can we measure its mechanical response?
In this post, we’ll look into the work by Niveditha Samudrala and her colleagues on measuring the mechanical properties of a particle-stabilized interface. They utilize a direct approach of applying force on such a stabilized interface to study its mechanical response that has eluded earlier techniques. Knowing the stiffness of these particle-coated interfaces, say in the form of capsules, would enable us to use them for different controlled-release applications such as treating a narrowing artery [1] as well as tune them to have different flow properties.
The authors use tiny (smaller than a micrometer!) dumbbell-shaped particles with different surface properties to stabilize an oil-in-water emulsion (see note [2]). Here instead of a thin layer of water sandwiched by the soap molecules, the water-oil interface has been stabilized with micron-sized particles. This stabilization technique will render higher mechanical properties to the interface. Droplets stabilized in this way, known as colloidosomes, have been shown to be capable of encapsulating a wide variety of molecules.
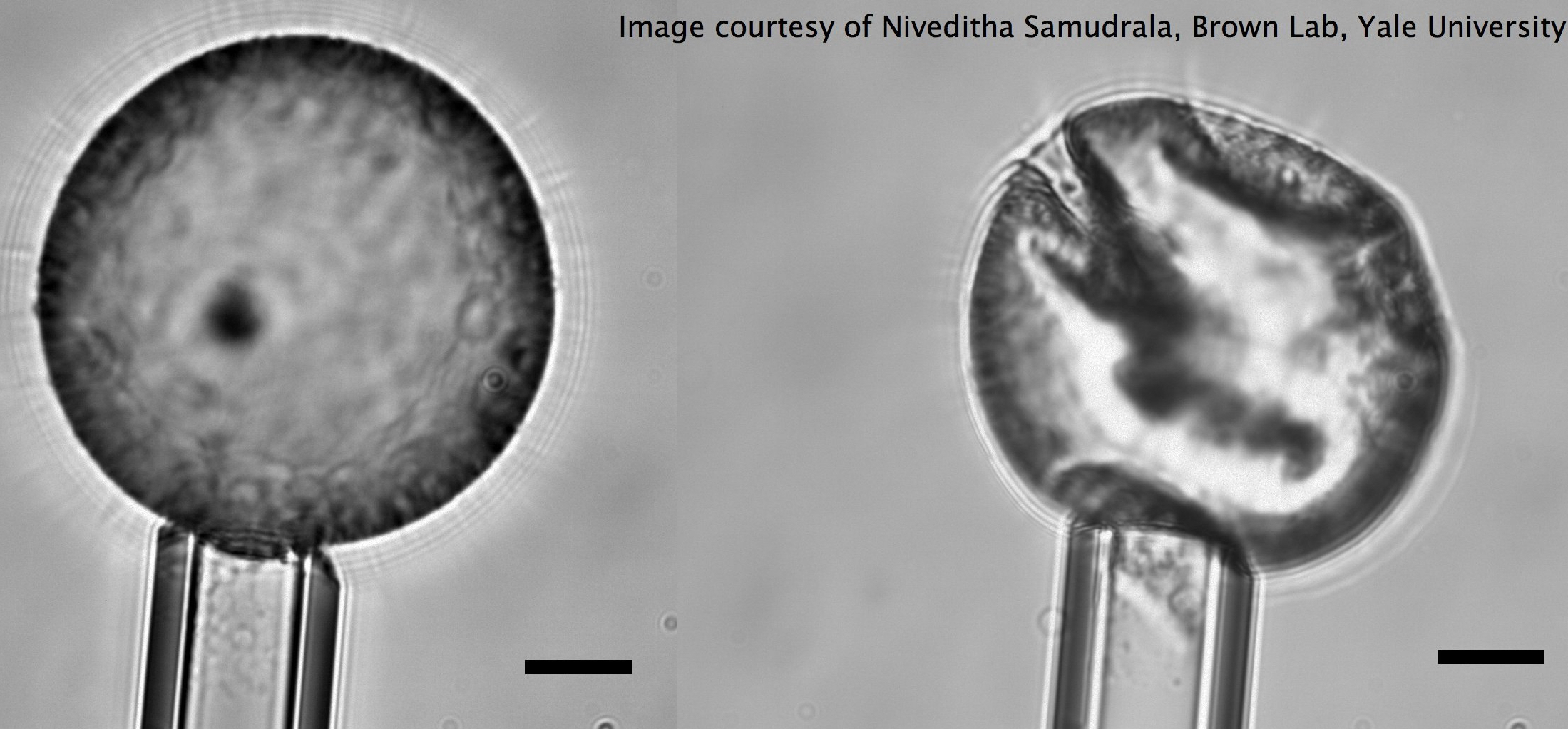
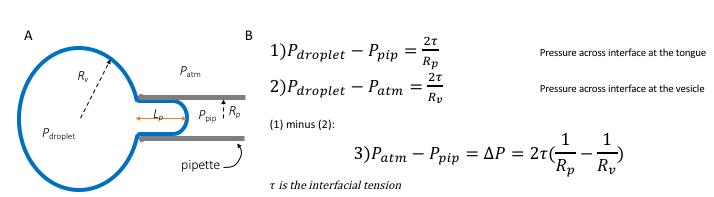
The researchers characterized the particle-stabilized droplets using the micropipette aspiration technique. To understand this technique, imagine picking an air bubble with a straw. What you need to do is to approach the air bubble and then apply a gentle suction (or aspiration) pressure. When the suction pressure becomes larger than the pressure outside of the droplet, then the droplet gets aspirated into the straw forming theaspiration tongue (Figure 1A). Similarly, in the micropipette aspiration technique, a glass pipette (the straw) with an inner diameter of $latex R_p$ is usually used to aspirate squishy stuff, such as cells, vesicles, and here droplets.
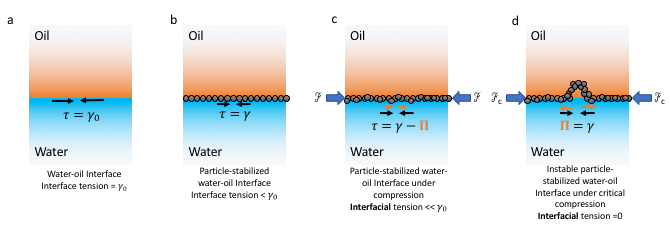
To obtain the tension response, therefore the toughness of an aspirated interface, we need to consider the pressures applied to the interface. Let’s consider an aspirated droplet as shown in Fig 1A at mechanical equilibrium (which means the sum of all the forces is zero). We know that each interface has a surface tension acting on it (See Fig 2a). In our bubble example, I mentioned that the soap molecules tend to gather at such interface to decrease the tension (See Fig 2b). But when there are other forces acting on the interface in addition to the presence of the molecules, such as the suction pressure in our case, the tension of the interface now comes from both the surface tension and the suction force. We call this total force the interfacial tension (See Fig 2c). The Young-Laplace equation can be used to relate this interfacial tension to the pressure applied to the interface (Fig 1-B3).
Fig1. Schematic representation of the aspiration technique (A) and the Young-Laplace equations obtained at both interfaces of the outer edge of droplet and tongue inside the pipette (B). $latex P_{atm}$ is the atmospheric pressure set to zero, $latex P_{droplet}$ is the pressure inside the droplet. $latex P_{pip}$ is the suction pressure. $latex R_{v}$ is the radius of droplet outside the pipette and the $latex R_{p}$ is the pipette radius.
When the molecules, or particles in our case, are forced to pack tightly together they oppose the compression force. This opposition is felt at the interface by a pressure called surface pressure (see Fig 2c). Under the interface tension and the surface pressure, the new net interfacial tension is defined as:
$latex \tau=\gamma_{0} – \Pi$.
where $latex \Pi$ is the surface pressure, $latex \gamma_{0}$ is the interface tension which is constant for a given interface.
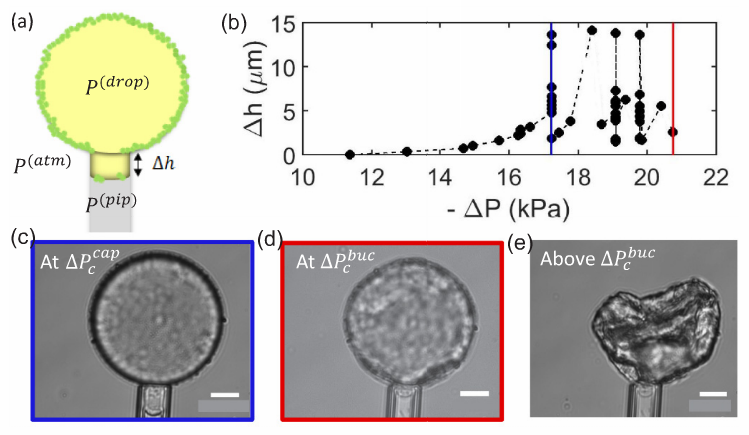
In this study, Samudrala and her colleagues show that there are two critical pressures after which instabilities form at the interface resulting in droplet dripping into the pipette and buckling respectively (Fig 2d). They conclude that the dripping happens due to the transition of the interface from a particle-stabilized interface to a bare oil-water interface resulting in a sudden suction of tiny oil droplets (basically the droplet drips at this point, see Fig 3B, blue and 3C).
The second instability is the buckling which the researchers propose happens when $latex \tau$ tends to zero. Now let’s see how buckling happens.
Fig 2. The schematic of a particle-stabilized water-oil interface under different load is shown. (a) shows the bare water-oil interface. This interface has a constant, material related surface tension, the $latex \gamma_{0}$. (b) depicts a particle-coated interface. The aggregation of the particles at the interface, decrease the interface tension to a new value of $latex \gamma$. (c) the particle-coated interface is compressed from both ends. This case happens in our case when the particle-coated droplet is stretched (see the text). (d) the compressed interface reaches a critical pressure upon which the net tension of the interface is zero and the buckling happens as the interface cannot no longer endure the imposed force.
The dripping at the first critical pressure decreases the volume of the particle-coated droplet, but note that the surface area is constant because neither particles leave the surface nor the free ones join the droplet (the latter argument is assumed). The continuation of the increase in suction pressure plus the volume lost in the dripping step results in the buckling of the interface (Fig 3b red and 3E, also see note [3]). When the authors aspirate the bare oil droplets as well as droplets stabilized by small molecules, they only see the sudden droplet disappearance with no shape abnormalities due to the fluid nature of the interface rather than solid-like nature for the particle-stabilized case. But why does the buckling happen?
Fig 3. Evolution of instabilities of a particle-coated droplet under tension. (a) shows the schematics of the particle-coated droplet being aspirated. (b) Change in aspiration length as a function of suction pressure. Blue line remarks the capillary instabilities. Red line shows the elastic failure of buckling process. (c & d) are the images of capillary and buckling instabilities respectively. (e) shows the case when the suction pressure is above buckling pressure at which the particle coat fails (the figure is adapted with no further change from the original paper).
Recall how we defined the net interfacial tension above; $latex \tau=\gamma – \Pi$. The authors hypothesize that upon suction of a particle-stabilized droplet, particles jam at the interface of the droplet outside of the pipette, creating a high surface pressure. When this surface pressure approaches $latex \gamma$, the net tension becomes zero ($latex \tau=0$, see fig 2d and note how the interface tension is opposed by the surface pressure due to repulsion between particles). When an interface possesses no tension, it means that the interface can no longer bear any loads. Considering any sort of defects or irregularities due to nonuniform particle packing, for such interfaces deformations such as buckling will form. Now, let’s see how the authors test their hypothesis.
The authors observed that at the tip of the tongue, there is a very dilute packing of particles in such a way that the interface to a good approximation resembles the Fig 2a, a bare water-oil interface. With this observation, one can safely assume that the interfacial tension, the $latex \tau$ is equal to the oil/water interface tension, the $latex \gamma$ and write the Young-Laplace equation across the tip of the tongue (see Fig 1B-(1)):
where $latex R_{p}$ is the radius of the pipette and is fixed. The authors experimentally show that for a range of droplet size ($latex 10\ \mu m < R_{droplet} < 100 \ \mu m$), the droplet pressure right before buckling varies very close to zero (in above equation all parameters are known except the $latex P_{droplet}$, which is calculated when we put $latex P_{pip} = P_{buckling}$). Therefore, considering the equation (2) in Fig 1B, the net tension would be zero (see note [3]) and with this, the authors correlate that the reason for the formation of buckling is the net-zero tension of the interface.
Taking it all together, we saw that for a droplet with solid-like thin shell, the mechanical response is completely different from the bare or the molecule-stabilized interface. A fairly rigid interface undergoes buckling due to its net tension tending to zero and knowing the threshold of buckling will enable us to tune the mechanical properties of such droplets for different applications from load-caused cargo release (see note [1]) or emulsions with varied flow properties. Imagine if we encapsulate a fragrance in our air bubble, which upon rupturing will release the scent. Now, wouldn’t it be nice if we could control the toughness of this bubble or similar architecture to rupture under a specific condition that we desire (see note [1])?
[1] In a disease called atherosclerosis, the arteries narrow down due to plaque buildup. In this narrow region, the blood pressure is higher than the normal region of the artery. So one can use this pressure difference to crack release the relevant drug from the capsule only in the narrow regions of the artery to dissolve the plaques away. Neat!
[2] If we apply a shear force on a mixture of two or more immiscible liquids in the presence of a stabilizing agent, we produce an emulsion and the stabilizing agent is called an emulsifier. The particles show a significantly higher tendency to gather at an interface in comparison to amphiphilic molecules. Thus, particles are strong emulsifiers. If we mix lemon juice and oil, soon after stopping the mixing, the two solutions will separate. Now, if you add eggs, you stabilize this mixture (egg works as an emulsifier) and you get Mayonnaise!!
[3] The authors report that for particle-stabilized droplets they observed different deformation morphologies such as wrinkles, dimples, folds and in some case complete droplet failure. They attribute this diversity to the non-uniformity of particle packing at the interface. But what is interesting to me is when they decrease the suction pressure, the droplets go back to their original spherical shape and then upon the second aspiration, the deformations happen at the same exact location as were for the first aspiration. This means that during the suction, there is limited particle rearrangement (Watch here).
[4] We can easily set the atmosphere pressure to zero before aspirating the droplets, thus here the $latex P_{atm} = 0$.