Original paper: 3D necroprinting: Leveraging biotic material as the nozzle for 3D printing
Author: Manikuntala Mukhopadhyay
Editor: Jack Llewellyn
If there is one insect that rarely receives any appreciation, it is probably the mosquito! Mosquitoes are infamous for ruining summer evenings, causing itchy bites and spreading some of the world’s deadliest diseases. Most of us spend our lives trying to avoid them. However, a team of researchers from Canada’s McGill University recently found an unexpected use for one of nature’s most unpopular insects: turning mosquitoes into components of a 3D printer.
Modern 3D printers often work by squeezing material through a nozzle, rather like icing being piped onto a cake. The smaller the nozzle, the finer the structures that can be printed. However, manufacturing extremely small dispensing nozzles is neither simple nor sustainable. High-resolution dispensing tips are typically made from metals, plastics, or glass and require specialised fabrication techniques that can be expensive, technically challenging and energy intensive.This led the researchers to ask a rather unconventional question: what if nature had already engineered an alternative?
Rather than building a new nozzle from scratch, the researchers decided to borrow one from nature, specifically, from a mosquito. To do so, Changhong Cao and his team introduced a technique called 3D necroprinting, in which parts of deceased mosquitoes were repurposed as engineering components. Although we usually think of mosquitoes as little more than irritating bloodsuckers, their feeding apparatus is a remarkable feat of natural engineering. The mosquito feeds through a needle-like structure called proboscis, a highly specialised microfluidic device refined through millions of years of evolution. To successfully feed on blood, the proboscis must satisfy several demanding requirements. It needs to be stiff enough to penetrate skin, thin enough to minimise damage, and hollow enough to transport fluid efficiently. Most importantly, its internal diameter is only about 20–25 micrometres, roughly one quarter the width of a human hair. In other words, the mosquito already possesses the kind of microscopic fluid-delivery channel that engineers spend considerable time, effort and resources trying to fabricate.
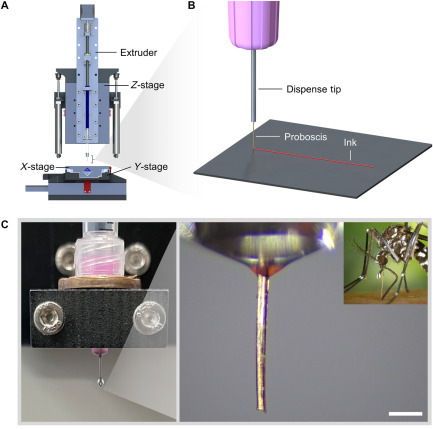
Next, to turn a mosquito into a printer nozzle, the researchers carefully extracted the feeding tube from female mosquitoes and attached it to a 3D printer. The concept was very simple. Figure 1 shows how instead of ending with a conventional metal nozzle, the printer terminated in a mosquito proboscis. Ink was pushed through the biological channel (Figure 2) and deposited onto a surface in precisely controlled patterns.
Although mosquito mouthparts appear delicate enough to break at the slightest touch, they are mechanically tougher than one might expect. To test their strength, the researchers sealed the tip of the proboscis and gradually increased the internal pressure, much like inflating a tiny balloon until it bursts. Surprisingly, the proboscis withstood pressures of approximately 60 kilopascals before rupturing. This was sufficient for many common printing inks used in bioprinting applications.
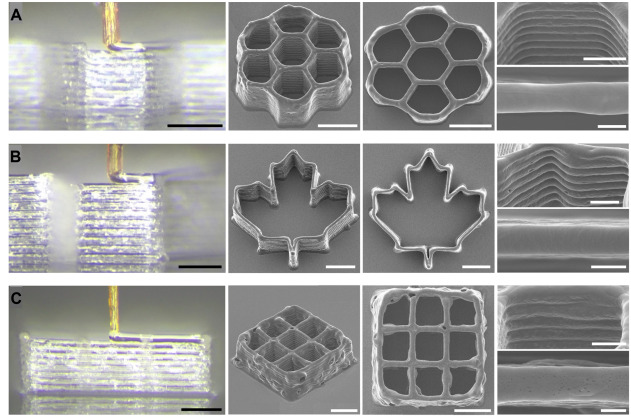
Once the mechanical limits had been established, the researchers began printing. The results were impressive! Using the mosquito nozzle, the team produced printed lines as narrow as 18–28 micrometres, substantially finer than those typically produced using common commercial dispensing tips. To demonstrate the capabilities of the system, they also fabricated a range of intricate structures including microscopic honeycombs and maple leaves (Figure 3). After all, what better way for a Canadian team to demonstrate a new printing technique than by printing a tiny maple leaf?
Perhaps the most exciting aspect of the work lies in its potential biomedical applications. The research team loaded their printing inks with living cells to show that the mosquito nozzle could handle delicate biological materials without causing excessive damage. This opens intriguing possibilities for future applications in tissue engineering, drug delivery and bioprinting. In other words, the same biological structure that evolved to extract blood from living organisms might one day help fabricate tissues for regenerative medicine.
At first glance, 3D necroprinting may seem like a quirky scientific curiosity. Yet beneath the unusual headline lies a powerful idea. Nature has spent millions of years refining structures that are remarkably specialised. The mosquito proboscis is one such example! The next time a mosquito lands on your arm, you will probably still swat it. But before you do, it might be worth remembering that hidden inside that tiny insect is a remarkably sophisticated piece of engineering. This work reminds us that nature is not merely a source of inspiration, but also a vast library of ready-made solutions waiting to be discovered. Sometimes, the next breakthrough in engineering may already be buzzing around us!
Disclosure: The author declares no competing interest.